- 销售电话:138-108-24283 / 中泰刘工
- 投诉电话:139-1165-8145
- ztic@ztic.cn (销售)
- 北京市北京经济技术开发区科创十三街29号院一区2号楼13层1301-17
手机版

扫码访问手机版
关注微信
扫码关注官方微信
测试背景在现代制造行业中,先进的制造技术不断的代替传统的加工方法和操作方式。现代工业的高技术要求,更促进了机器人的发展:例如,实行无人化的工作车间,自动生产线等。机械手(臂)是在机械化、自动化生产过程
|
测试背景 在现代制造行业中,先进的制造技术不断的代替传统的加工方法和操作方式。现代工业的高技术要求,更促进了机器人的发展:例如,实行无人化的工作车间,自动生产线等。 机械手(臂)是在机械化、自动化生产过程中发展起来的一种新型装置。近年来随着电子技术特别是电子计算机的广泛应用,机器人的研制和生产已成为高科技技术领域内迅速发展起来的一门新兴技术。它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。机械手虽然目前还不如人手那样灵活,但它具有可不断重复工作、能在条件比较恶劣的环境下工作、载重量大、定位精确等特点。因此,机械手受到了许多部门的重视,并越来越广泛地得到了应用。 测试对象 机械手,是指能模仿人手和臂的某些动作功能,按固定程序抓取、搬运物件或操作工具的自动操作装置。主要由执行机构、驱动机构和控制系统三大部分组成。它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工等部门。 目前机械手根据不同的要求可进行不同的分类: 1.按驱动方式分类 1) 液压式 液压驱动机械臂通常由液动机(各种油缸、油马达)、伺服阀、油泵、油箱等组成驱动系统,由驱动机械臂的执行机构进行工作。通常它具有很大的抓举能力(高达几百公斤以上),其特点是结构紧凑,动作平稳,耐冲击,耐振动,防爆性好,但液压元件要求有较高的制造精度和密封性能,否则漏油将污染环境。 2) 气动式 其驱动系统通常由气缸、气阀、气罐和空压机组成,其特点是气源方便,动作迅速、结构简单、造价较低、维修方便。但难以进行速度控制,气压不可太高,故抓举能力较低。 3) 电动式 电力驱动是目前机械臂使用得最多的一种驱动方式。其特点是电源方便,响应快,驱动力较大,信号检测、传递、处理方便,并可以采用多种灵活的控制方案。驱动电机一般采用步进电机,直流伺服电机以及交流伺服电机(其中交流伺服电机为目前主要的驱动形式)。
2.按用途分类 1) 搬运机械臂 这种机械臂用途很广,一般只需点位控制。即被搬运零件无严格的运动轨迹要求,只要求始点和终点位姿准确。如机床上用的上下料器人,工件堆垛机械臂,注塑机配套用的机械等。 2) 喷涂机械臂 这种机械臂多用于喷漆生产线上,重复位姿精度要求不高。但由于漆雾易燃,一般采用液压驱动或交流伺服电机驱动。 4) 装配机械人 这种机械臂要有较高的位姿精度,手腕具有较大的柔性。目前大多用于机电产品的装配作业。 5) 专门用途的机械臂 如医用护理机械臂、航天用机械臂、探海用机械臂以及排险作业机械臂等。
3.自由度数量分类 操作机本身的轴数(自由度数)最能反应机械臂的工作能力,也是分类的重要依据。按这一分类要求,机械臂可分为4轴(自由度)、5轴(自由度)、6轴(自由度)等机械臂。 我们大家平时在看到的工业机器人大部分都是串联机器人。串联机器人,一个轴的运动会改变另一个轴的坐标原点。通俗的讲,它的各个运动关节是是像糖葫芦一样,串在一起的,所以叫做串联机器人。如图1所示:
图1
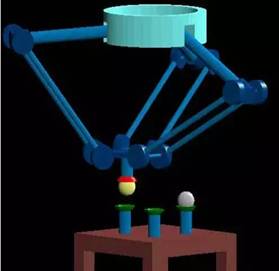
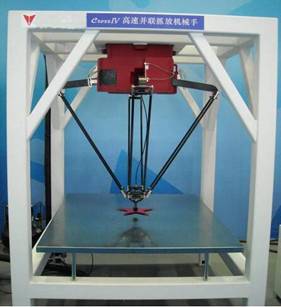
并联机器人的各个运动关节像板凳或是照相机三脚架的几个腿一样,是一种并排的结构(即一个轴运动不影响另一个轴的坐标原点),所以叫做并联机器人。并联机构可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。如图2和图3所示:
图2
图3
并联机器人具有速度高、刚性强、精度高、结构紧凑、自身负荷小、可靠性高、使用寿命长、节能环保等优点。在人力成本日益增加的时代,广泛应用于食品,制药,包装以及电子行等各个生产环节,例如饼干的抓取与码放,酸奶的抓取与包装,点心的抓取与分拣,输液袋的抓取与码放,电脑键盘装配等等。
系统描述 并联六自由度机械手测控系统是北京中泰联创科技有限公司和北京某大学机器人科研实验室合作提供的技术解决方案,硬件方面通过EM9000系列多功能数据采集设备(EM9636BD)负责完成机械手6个自由度(X移动、Y移动、Z移动、X转动、Y转动、Z转动)的数据采集与驱动力控制。 现场被测机械手以液压为驱动方式,液压传动是以有压力的油液作为传递动力的工作介质。电动机带动油泵输出压力油,是将电动机供给的机械能转换成油液的压力能。压力油经过管道及一些控制调节装置等进入油缸,推动活塞杆运动,从而使手臂作伸缩、升降等运动,将油液的压力能又转换成机械能。机械手在运动时所能克服的摩擦阻力大小,以及手部夹紧工件时所需保持的握力大小,均与油液的压力和活塞的有效工作面积有关。机械手做各种运动的速度决定于流入密封油缸中油液容积的多少。
如图4、图5所示,此为现场做测试的并联六自由度运动平台:
图4(并联六自由度运动平台)
图5(油缸油液压力传感器)
系统特点 并联六自由度机械手测控系统采用了当今先进的、模块化、标准化测试技术和产品。硬件应用以太网总线平台产品,集成了系统控制与数据采集功能,方便今后的维护与扩展;工业现场成熟的PLC系统,采用流行测试软件开发。由于有了优良的软、硬件组合,该系统具有可靠性高、性能价格比高、实用性强、操作简单、维护方便等特点。 ☛采用质量优秀的进口液压传动系统(油泵、液动机、控制调节装置),保证了各个工位的机械手运动位置的稳定和准确。 ☛支持自定义编辑各油缸(单拍)行程参数(添加、删除、修改、保存、调用),并形成程序段。能够实现单拍或连续的轨迹控制,实现了测试的全自动化,提高效率。 ☛采用6路模拟量输出信号(DA)和1路同步控制信号(DO)控制6个缸的油液压力,进而控制各个自由度的运行。实现命令的同步下发,确保了各方向运动的同时动作。 ☛采用高速AD在每运行完一个节拍动作后采集传感器信号,并与设置数据进行比较,自动执行误差判定与后续运行执行。 ☛可记录传感器数据,软件修正传感器采集数据。
l 系统指标 1. 全部输入/输出信号通道实现通道间隔离; 2. DAQ设备工作温度:0~55℃(可定制宽温); 3. 采集分辨率:16位; 4、最高(同步)采集频率:40KHz; 5. 测量参数:电压信号、电流(4~20mA)信号; 6. 运动节拍步进时间误差<=1ms; 7. 各油缸行程位置精确到10um(量程范围:0~400mm);
操作台软件界面
液压平台-紧凑式六自由度运动平台
并联六自由度运动平台通过六个驱动缸的协调伸缩来实现平台在空间六个自由度的运动,即平台沿x、 y 、 z 向的平移和绕 x 、 y 、 z 轴的旋转运动(共6个自由度),以及这些自由度的复合运动。并联六自由度运动平台可用于机器人、飞行模拟器、车辆驾驶模拟器、新型加工机床、导弹等飞行器、娱乐业的运动模拟(动感电影摇摆台)、多自由度振动摇摆台的精确运动仿真。 |
|
上一篇:没有了下一篇:串口设备网络化解决方案
|
扫一扫Get更多资讯

Copyright © 北京中泰联创科技有限公司 版权所有 ICP备案号:京ICP备18049974号-1  京公网安备:11010802021254号
京公网安备:11010802021254号